Orbital Mechanics
Newton's Law of Gravity
The N-body Problem
We are interested in the motion of n particles or masses interacting with each other via
mutual gravitation. We will denote the mass of each particle as
velocity of each particle as
We can denote the distance between two bodies i and j as
Newton's Law of Universal Gravitation for N bodies For a system of N particles each with mass
the force on body i is directed raidially towards particle j in the direction of the unit vector
Equations of motion for N bodies For an N-body system, the equations of motion are:
2 body problem
For a system of two bodies, our equations of motion are:
However, we generally are more interested in the relative motion of the two bodies. We can therefore define
so taking the difference of the above 2 equations we get
which is what we call the fundamental ODE of the 2 body problem
however notice that this implies
so we conclude immediately that
we denote
we may also derive the eccentricity vector
in which we obtain
its magnitude
Proof.
Step 1: Compute the Time Derivative
Consider the expression
Compute each term separately.
Step 2: Derivative of
Using the product rule for cross products:
Since
Thus:
Substitute the acceleration:
So:
Since
Use the vector triple product identity
Since
Now:
Distribute:
So:
Step 3: Derivative of
Rewrite
Use the product rule for
Since
Compute
So:
Thus:
So:
Alternatively, use the product rule directly:
Step 4: Combine the Results
Now, sum the derivatives:
Combine like terms:
terms: terms:
This equation can be then rearranged to give the orbital equation by taking its dot product with the position vector
where
Proof:
Step 3: Take the Dot Product with the Position Vector r
Following the image's hint, we take the dot product of the LRL vector A with the position vector r:
Using the distributive property of the dot product, this splits into two terms:
Step 4: Compute Each Term
First Term:
Use the scalar triple product identity:
Since
The dot product of a vector with itself is the square of its magnitude:
So:
Second Term:
Compute:
Since
Combine:
Step 5: Express the Dot Product Geometrically
Since A is a constant vector, the dot product
where:
is the magnitude of the LRL vector.
, A aligns with the periapsis direction, so
Thus:
Step 6: Solve for
Rearrange the equation to isolate terms involving
Factor out
Solve for
Step 7: Convert to Standard Orbital Equation Form
Rewrite the expression to resemble the orbital equation:
Compare this to the standard form:
• The semi-latus rectum is:
• The eccentricity is:
Since
Thus:
Finally we define
The total mechanical energy per unit mass of the system
To sum up what we have so far we essentially have shown
Kepler's First Law
Each of the planets orbits the sun in an ellipse with the sun at once focus
this is a restatement of the equation of orbit just above
Kepler's Second Law
A line joining a planet to the sun sweeps out equal areas in equal times
This law can be verified by writing the position and velocity vectors in cylindrical coordinates
so that
The angular momentum vector h is constant, and its magnitude
is proportional to the rate at which the radius vector sweeps out area.
4. Orbital Manoeuvres
Common types of orbit
Low earth orbit
Sun syncronous orbit
5. Coordinate Systems and Orbital Elements

State Vector and Orbital Elements
ECI frame(earth centered intertial)
unit vector in the direction of the mean vernal equinox on 1 January 2000 at 12:00:00.00. (Sometimes denoted as in reference to the constellation Aries). unit vector in the direction of the Earth's mean rotation axis on 1 January 2000 at 12:00:00.00. completes the set, i.e. .
ECEF(earth centered earth fixed)
vector in the direction of the intersection of the Greenwich meridian with the equatorial plane. vector in the direction of the Earth's rotation axis, coincides with completes the set, i.e. .
therefore the vectors
just consider that
and obviously we can relate ECI coordinates with ECEF coordinates through a rotation matrix in the x,y plane like so
which is just anticlockwise by
Perifocal Frame
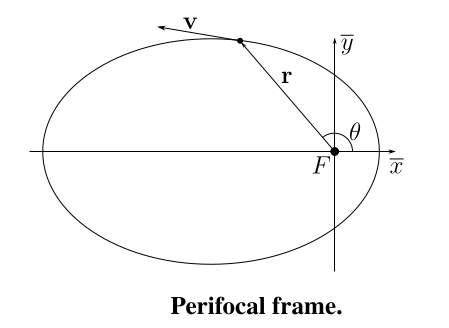
vector directed along the eccentricity vector, pointing towards periapsis. completes the set, . vector directed along the angular momentum vector, out of the orbital plane.
The plane
note that
we have that
given that
Rewrite the orbit equation as a product:
Since the right-hand side is constant, differentiate both sides:
Apply the product rule:
From Step 4:
So:
Substitute
Now, use
so essentially it is now clear to see we can write
position and velocity and perifocal frame is
State Vector and Orbital Elements
recall:
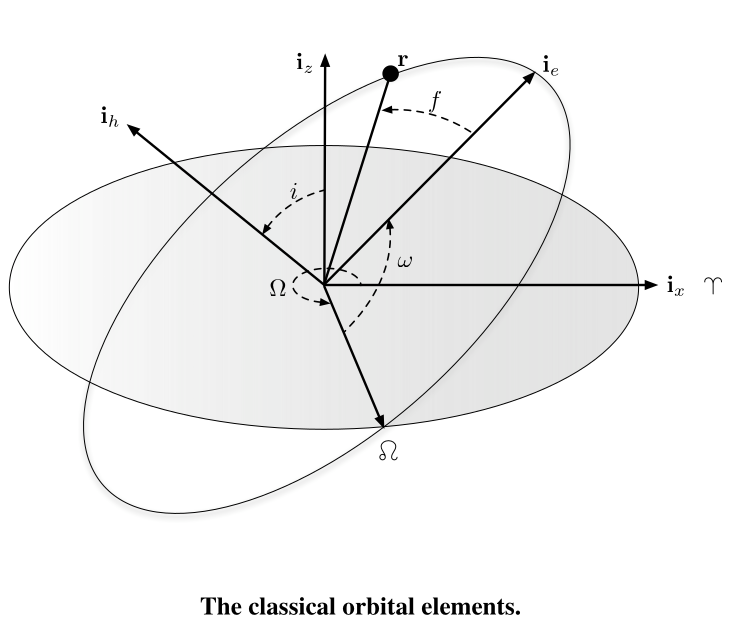
Consider the 6 classical orbital elements
the semimajor axis the eccentricity the inclination the right ascension of the ascending node (RAAN) the argument of periapsis the true anomaly
note that
To obtainj the position and velocity in the inertial frame,
where we have the rotation matrices
find the eccentricity
To find e, we first calculate
Expand the dot product using the distributive property:
Evaluate each term:
Since
But
Therefore:
- Second term (cross term):
Compute
Since
Then:
7. Non Keplerian Orbits
Recall that so far we have solving the classical two body problem where the dynamics is
now consider the case where there is perturbing acceleration
the most accurate solutions come from special perturbation methods like Cowell's method(which consists of a lot of Runge-Kutta numerical integration) however they are very computationally expensive. Instead we try to use as much information as possible we have from unperturbed Keplerian motion first. The procedure to this is known as Encke's method